PROJECTS
3D STEREO OBSTACLE AVOIDANCE
Obstacle avoidance using pixhawk flight controller and stereo camera setup. Extrated the point clouds and used reconstructed polar histogram using it. Histograms from previous time steps where used to percieve the environment better. Cost function based on orientation and the smoothing term where used to assign weights to the field of view. Based on these navigation avoiding obstacles was established.
VISUAL ODOMETRY
Development of python package to reconstruct indoor and outdoor environments with diverse texture contrasts using Oriented FAST and Rotated Brief feature detector, FLANN based matchers and RANSAC for outlier removal; Optical flow and PnP (DLT and Levenberg) for estimating the pose of robot.
ROS BASED AUTONOMOUS DRONE SIMULATION
Developed a ROSpy based control system for a quadcopter to transverse to a set of GPS setpoint autonomously. The Control System has two modules namely the Altitude controller and the position controller, Altitude controller stabilizes the drone at the zero error Roll, Yaw, Pitch angles using a PID based controller, the position controller takes in the target GPS coordinate has setpoint values and calculates the roll yaw pitch angles to successfully move to the setpoint coordinates. these controllers work in synchronization to autonomously fly the drone from one coordinate to another
3D MAPPING OF MOBILE ROBOT
Implemented 3D mapping using Kinect and RGB-D Camera sensors on ground vehicle. A ground robot was added with the necessary sensors mentioned above and implemented mapping it with an indoor environment. Real time appearance-based mapping (RTAB-Map) was used to make the 3D map launched in gazebo environment. Then, BUG-2 algorithm was used to move the robot in the environment, reading the sensor data and ultimaately mapping. And also RViz was used to visualize the 2D ma, created using Rtab-map.
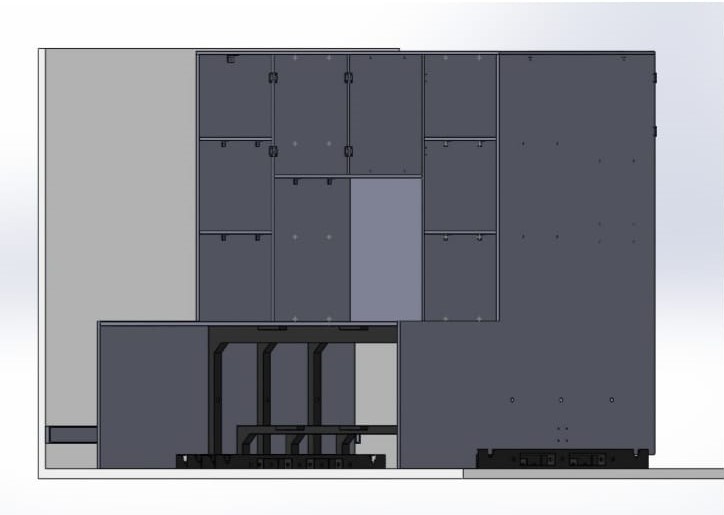
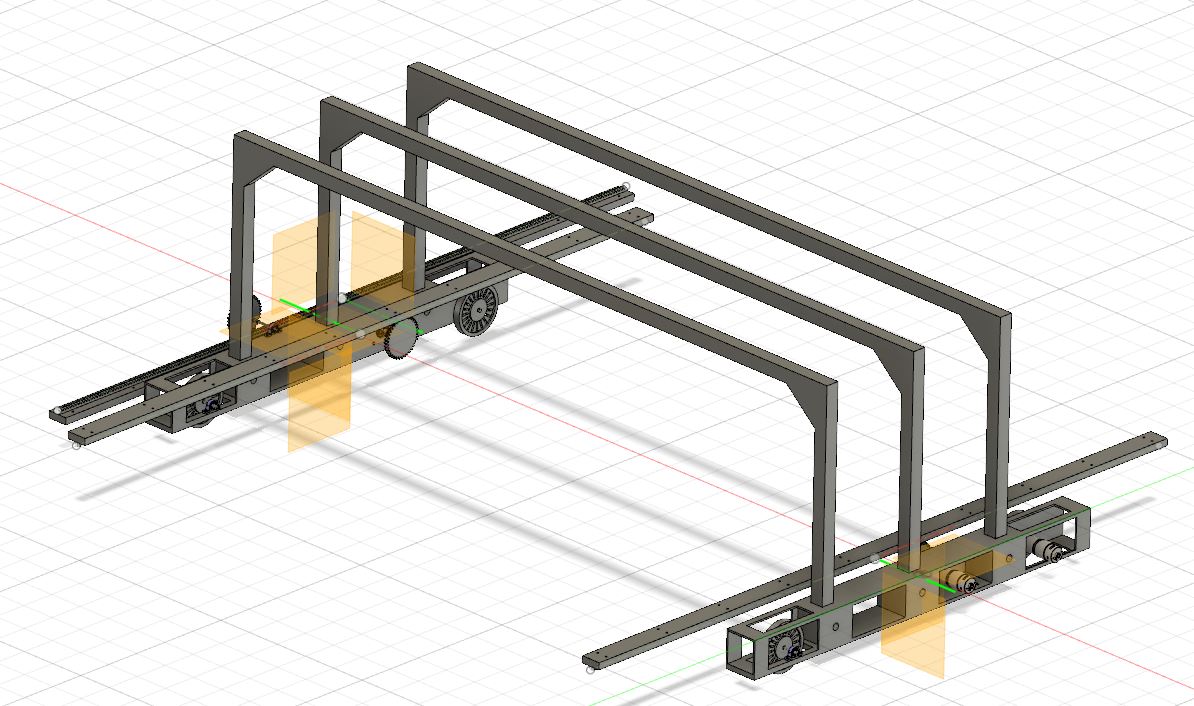
VESTIUM- SMART ROBOTIC CLOSET
Designed a 80*80 smart robotic furniture, which maximizes small spaces whiCh will be poised to transform urban living. It is packed with plenty of space, hiding the bed when not in use, and allows to optimize space, at touch of a button. It can be used as an entertainment center, home office, bedroomm, storage all in one closet. At present in prototyping phase, with an optimism to make it a startup product.
AUTONOMOUS LINE FOLLOWER
Advanced PID based line follower equipped with the ability to find the shortest path using BUG2 algorithm alongside the PID algorithm. The controller's PID algorithm restores the measured speed to the desired speed with minimal delay and overshoot. Bug2 algorithm employs greedy algorithm and it will take the first path that looks better.
Algorithm: PID and BUG2 algorithm.
Competitions Won: 17 (from 01/2019 - 03/2020)
Components used: N20 Micro Geared Motors, MDD10A, Arduino Nano, 16 sensor array, 3D printed Chassis[PLA] & Silica wheels.
DRONE NAVIGATION USING BEHAVIORAL
A behavior tree was used to specify the mission plan for the drone in an AEROSTACK framework. AEROSTACK helps developers design and build control architecture of aerial robot systems, integrating multiple heterogenous computational solutions. There are 2 important functions here: the behavior tree editor is used to set the missionplan using available behaviors and hierarchies, and the interpreter executes th ebehaviors set in the editor. The four behaviorals used in this video are Take-off, Follow path, Rotate and Land.
GMapping-based SLAM for AGV
Implementation of Gmapping using 2D lidar using turtle bot in ROS in Gazebo environment to construct a 2D map using RViz in an indoor environment. Also, an Adaptive Monte Carlo localization (AMCL) based navigation stack was used to move the ground robot to a navigation goal
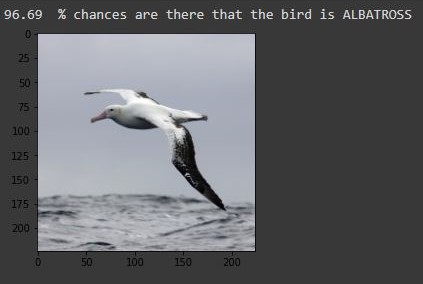
BIRD SPECIES CLASSIFICATION
Developed a Web App, with a customized trained Model using transfer learning and data augmentation, consisting of 100+ bird species. VGG16 pre-trained model was freezed and used alongside augmented training and validating images to increase the accuracy by keeping the computational eficiency in mind. An overall IOU of 96.5% was obtained when evaljuation of the trained model was computed with individual prediction going upto 98.73%.