OUR ROBOTS
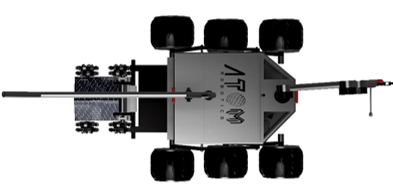
SCORP || THE TERRAIN KILLER
An RC bot witth attached pick and place arm.This bot is capable to lift load and move easily at a high speed at any terrain. Though it looks simple the customised chasis makes it ease to run at any surface.
Zeus || LINE FOLLOWER
An advanced line follower capable of solving maze based on line follower. With the help of pololu 8 Array sensor and our modified PID calculation this is recognised as the fastest in many competitions.
Roccinate || LINE FOLLOWER
Advanced PID-based line follower equipped the PID algorithm. Uses a 8 sensor array with PWM for motors to maintain a balance between speed and accuracy.
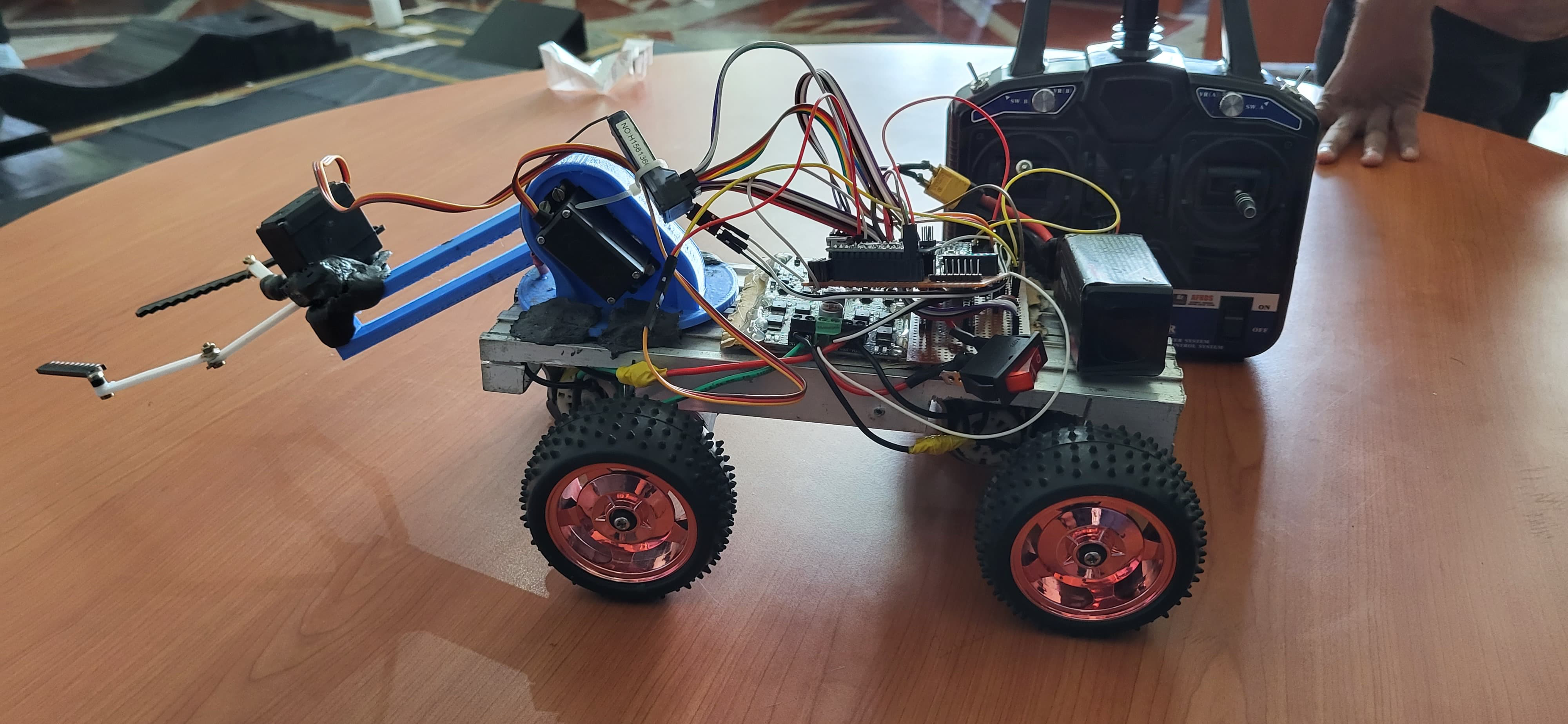
Arkav || ATV
RC wire-less terrain vehicle which can navigate in all surfaces with ease. High torque DC motors where used to make that work flawlessly in different terrains.

SPEEDY 3.0 || LINE FOLLOWER
Advanced PID-based line follower equipped with the ability to find the shortest path using BUG2 algorithm alongside the PID algorithm. Uses a 16 sensor array to maintain a balance between speed and accuracy.
SPEEDY 2.0 || LINE FOLLOWER
Line follower made using 6 IR array sensor logic and PID control algorithm to correct the error rate with ease.
SPEEDY 1.0 || LINE FOLLOWER
Simple Embedded C-based Line follower made using 3 IR array sensor logic, arduino uno microcontroller and L298N motor drivers.
JADE || ATV
RC wired terrain vehicle which can navigate in all surfaces with ease. High torque planetary motors where used so that it could climb highly uneven terrains as well.

BRIMSTONE || ATV
RC wireless terrain vehicle which can navigate in all surfaces with ease. High torque planetary motors where used so that it could climb highly uneven terrains as well.

ARCHER || DRONE
RC drone made using DJI F450 drone frame. Pixhawk controller was used and QGroundControl was use as the base station for monitoring and data logging.

VALKYRIE || DRONE
A smaller class RC drone with a very similar hardware setup as ARCHER, but can traverse in a more sharp and agile manner and was built for indoor experimentation (research).

OMEGA || Planetary Aerial System
An autonomous aerial planetary system designed for logistics and reconnaissance missions in the Mars environment by our team. Completely designed and tested from scratch considering the compatibility for flight in a Martian environment.

PEKKA || ROBOSOCCER
A very agile 4 wheeled wired RC soccer-playing robot. Net and side supports were used to tackle the ball.

HOG || DRAG
A differently designed C-shaped drag race robot that can move at a very high speed without loosing control.

VIPER || ROVER
Designed a mars rover prototype that can traverse autonomously inside tunnels. Visual inertial SLAM was used for navigating inside the GPS denied lava tubes and an MPC control system was implemented with absolute potential field-based navigation evading obstacles. Petrology study, soil and atmosphere analysis along with life test were done using the in-lab chemistry setup of the rover.